
 Planning complex maneuvers in real environments usually implies taking risks. For humans, these risks are qualitatively related to utility, comfort and social norms based on experiences and observations. In comparison, Artificial Intelligence systems can quantify risks based on a variety of parameters and influences. The result is a range of choices, each one having a calculated risk assigned. Complex planning supported by intelligent systems is therefore able to identify beneficial trajectories in the trade-off between utility and risk under the premise of machine ethics, e.g., for the use in autonomous driving or robot motion.
Planning complex maneuvers in real environments usually implies taking risks. For humans, these risks are qualitatively related to utility, comfort and social norms based on experiences and observations. In comparison, Artificial Intelligence systems can quantify risks based on a variety of parameters and influences. The result is a range of choices, each one having a calculated risk assigned. Complex planning supported by intelligent systems is therefore able to identify beneficial trajectories in the trade-off between utility and risk under the premise of machine ethics, e.g., for the use in autonomous driving or robot motion.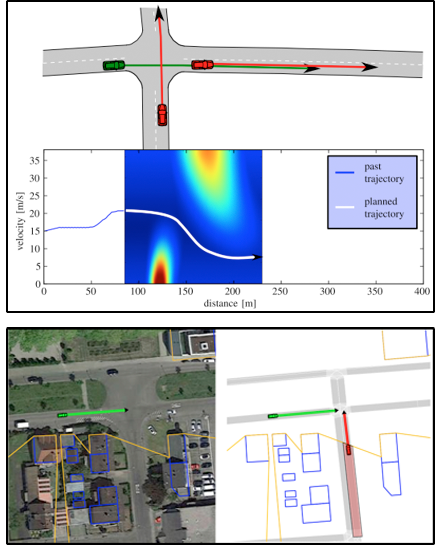 A key attribute of intelligent mobility systems is the capability to smoothly find safe trajectories in highly dynamic environments. This involves the evaluation of own behavior alternatives in the context of the anticipated scene dynamics, e.g., the predicted evolution of the other traffic participants.
A key attribute of intelligent mobility systems is the capability to smoothly find safe trajectories in highly dynamic environments. This involves the evaluation of own behavior alternatives in the context of the anticipated scene dynamics, e.g., the predicted evolution of the other traffic participants.

This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
Privacy Overview
Strictly Necessary Cookies
Show details
Strictly Necessary Cookie should be enabled at all times so that we can save your preferences for cookie settings.
If you disable this cookie, we will not be able to save your preferences. This means that every time you visit this website you will need to enable or disable cookies again.
| Name | Provider | Purpose | Expiration |
|---|---|---|---|
| moove_gdpr_popup | Honda | Storing of user's consent status for cookies on the current domain. | 7 days |
Privacy Policy
More information about our Privacy Policy