
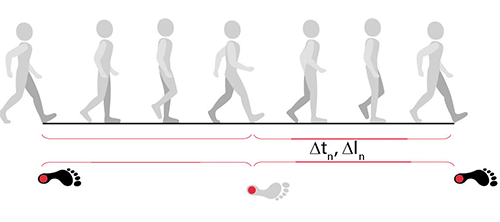
 Prediction is the estimation of how the future will evolve. It can be as diverse as a human’s motion, the weather or the next action performed by a human co-worker. While most of us have experienced the uncertainty in predicting the weather, the later example is qualitatively different. Humans have the freedom to choose their next step or behavior and it depends on preferences, experiences or context. In a similar way, machines are trained to decide based on a target function.
Prediction is the estimation of how the future will evolve. It can be as diverse as a human’s motion, the weather or the next action performed by a human co-worker. While most of us have experienced the uncertainty in predicting the weather, the later example is qualitatively different. Humans have the freedom to choose their next step or behavior and it depends on preferences, experiences or context. In a similar way, machines are trained to decide based on a target function.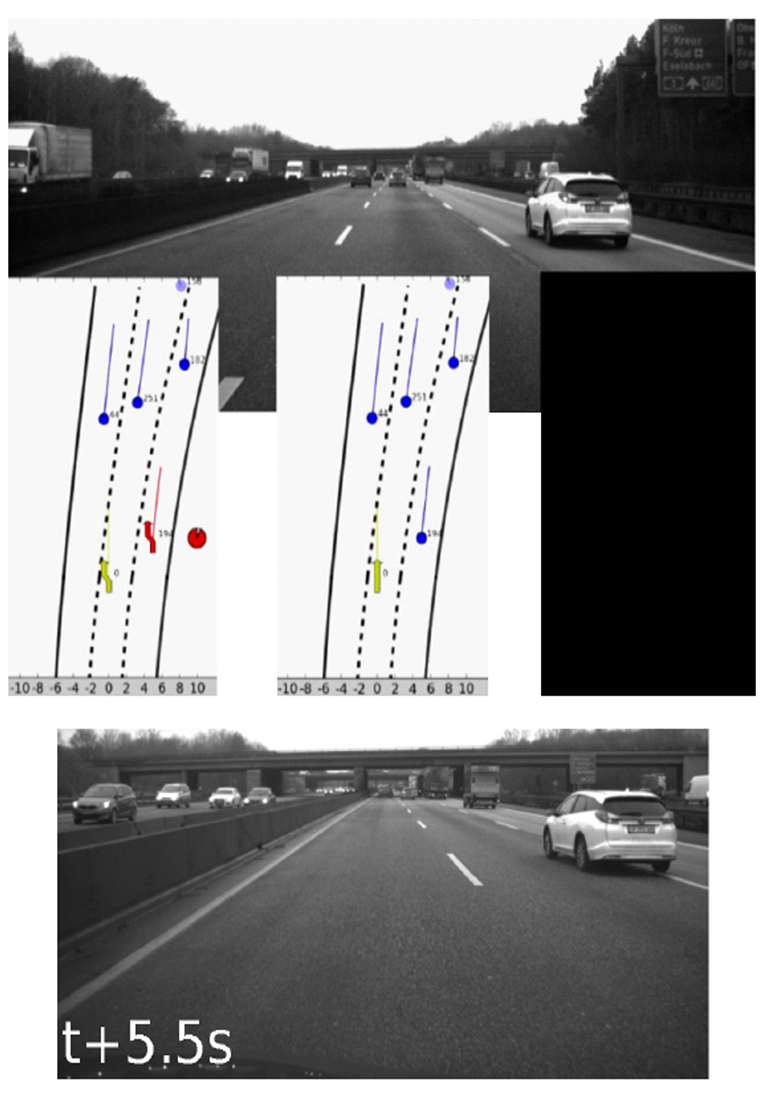 Predicting the lane change intentions of other traffic participants is an important challenge for autonomous driving and driver assistance systems. In this research, a physical prediction is combined with a context-based prediction and the ego-vehicle‘s behavior influence.
Predicting the lane change intentions of other traffic participants is an important challenge for autonomous driving and driver assistance systems. In this research, a physical prediction is combined with a context-based prediction and the ego-vehicle‘s behavior influence.

This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
Privacy Overview
Strictly Necessary Cookies
Show details
Strictly Necessary Cookie should be enabled at all times so that we can save your preferences for cookie settings.
If you disable this cookie, we will not be able to save your preferences. This means that every time you visit this website you will need to enable or disable cookies again.
| Name | Provider | Purpose | Expiration |
|---|---|---|---|
| moove_gdpr_popup | Honda | Storing of user's consent status for cookies on the current domain. | 7 days |
Privacy Policy
More information about our Privacy Policy